CHOREOGRAPHY OF 100
A Kinetic Sculpture Exploring Collective Behavior Through Autonomous Motion
Kinetic Sculpture • Physical Computing •
Modular Systems • Technical Illustration
PROJECT OVERVIEW
What happens when ordinary objects become performers? Choreography of 100 Brooms is a kinetic installation where 36 brooms sweep, rotate, and move in coordinated patterns. Originally envisioned as 100 autonomous brooms that sense and respond to their environment, the project has evolved into a scalable modular motion platform built on principles of multi-motor coordination and thoughtful design for assembly and maintenance.
The built system currently demonstrates coordinated multi-motor control at scale: 4 modular units containing 9 brooms each, a dual-motor system per broom enabling 60° sweeping motion plus 360° rotation. The 72 stepper motors operate simultaneously under a custom control board through a WiFi-enabled web interface.
Each module is a carefully orchestrated system. This modular unit assembly animation reveals the spatial organization of all of the components. From the laser cut and etched baseboard, to motors and their couplings, carefully chosen hardware parts, electronics integration, wiring, and more.
Future development includes camera sensor integration for trash detection, firmware changes that assign different "personalities" to each broom through varied movement patterns, and scaling toward the full 100-broom vision.
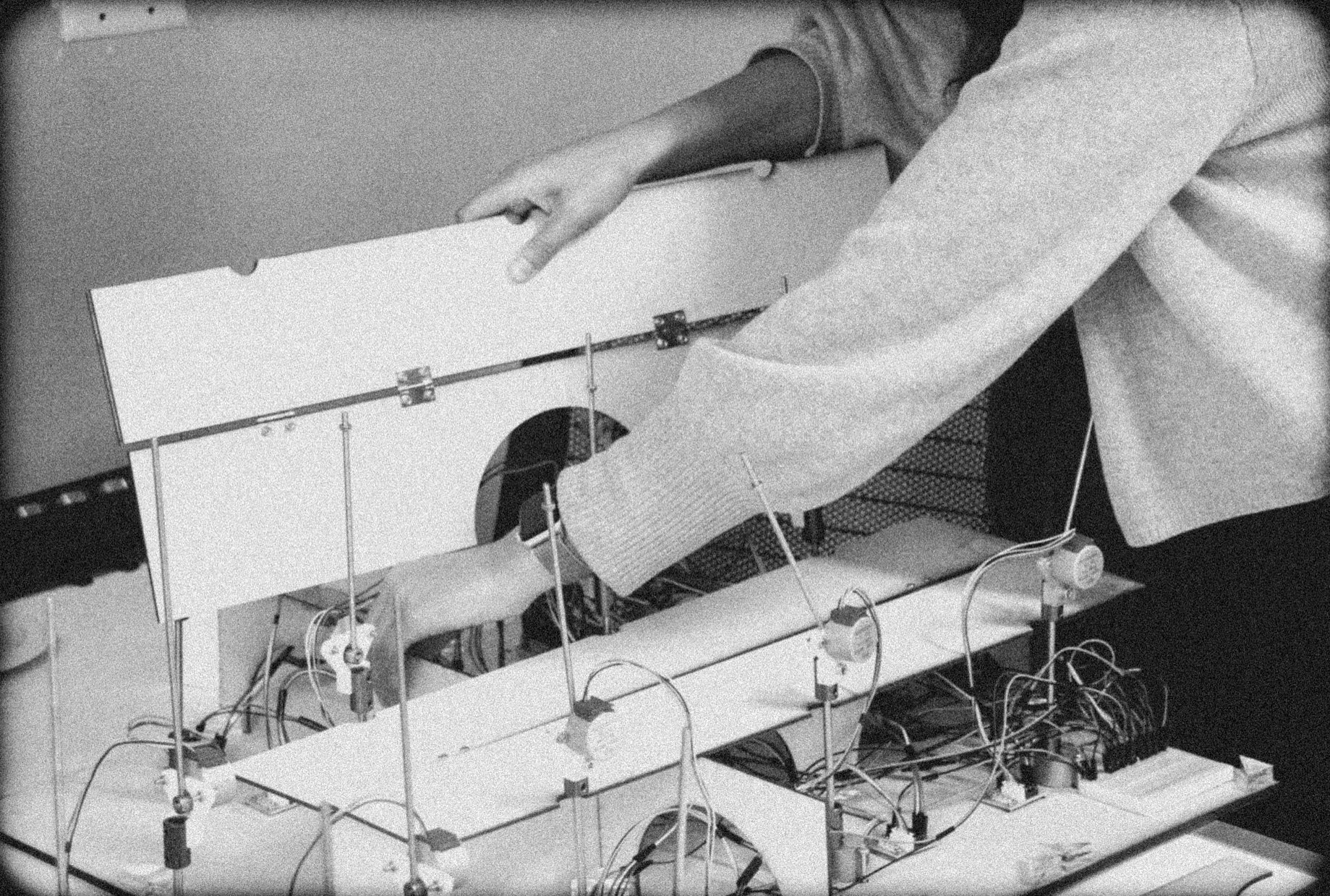
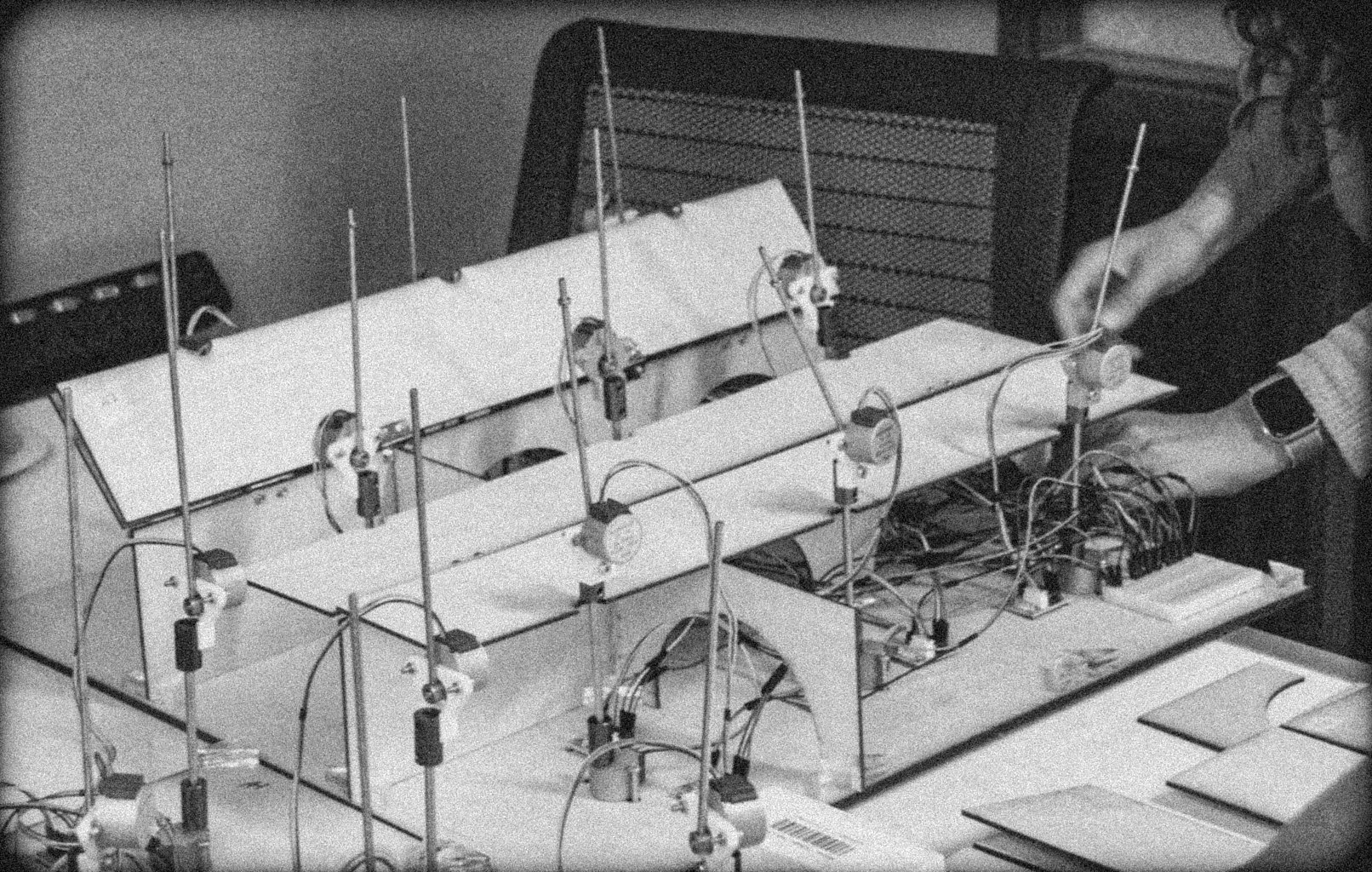
Maintenance and access was designed into the system from the beginning as changes and upgrades were anticipated. For example, these wooden panels, which cover various electronic and mechanical components, rotate open on continuous hinges, allowing servicing without requiring full disassembly. This animation highlights the hinged cover design that enables easy access while maintaining aesthetics.
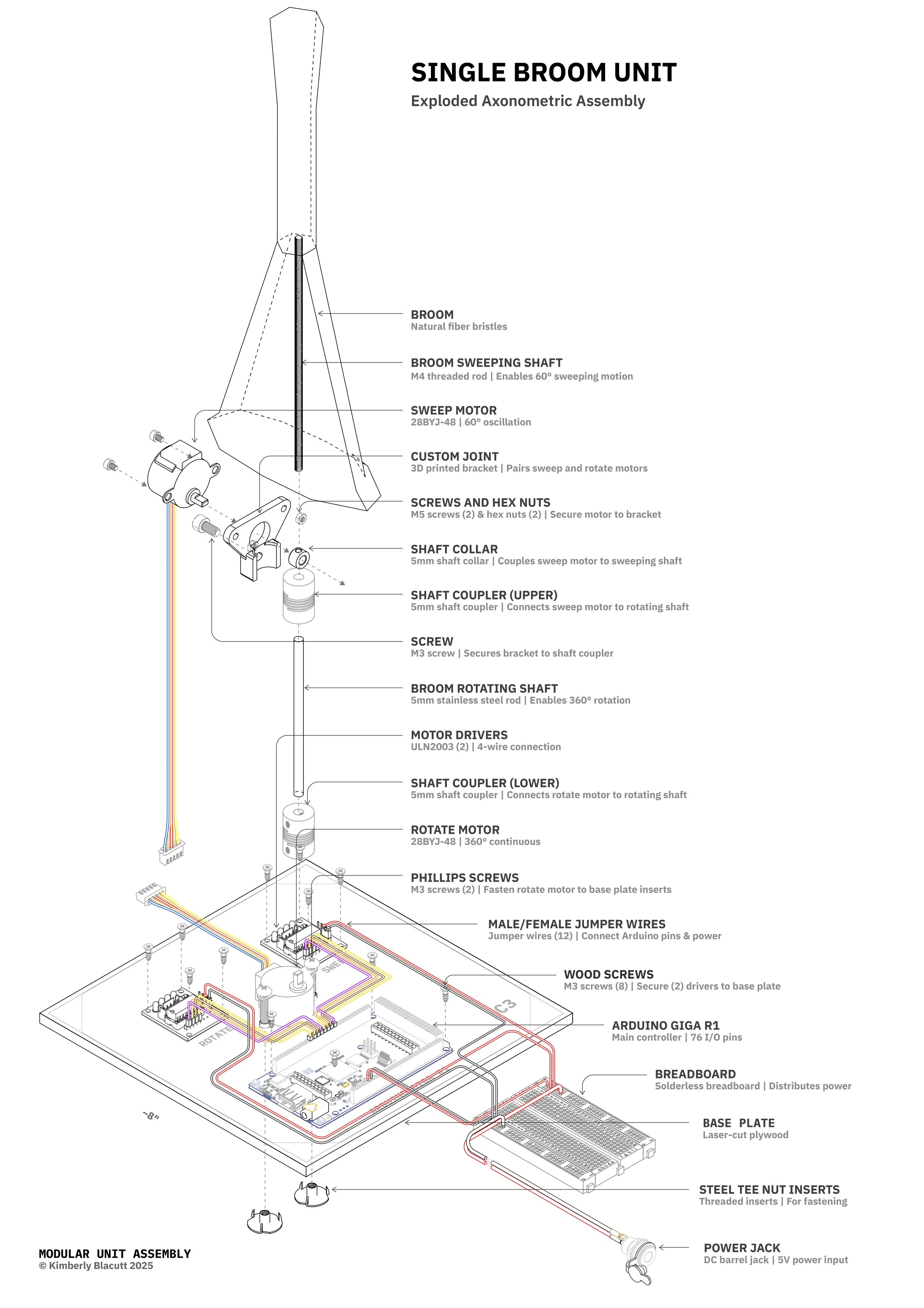
This exploded axonometric drawing visualizes all the components for 1 broom unit. (1 Arduino, breadboard, and power jack are shared between 9 broom units in a single module). This isometric view reveals how motors couple to shafts, how shafts connect to brooms, how electronics organize within the base. The unit is a building block.
The color-coded wiring system makes troubleshooting and service straightforward. Purple, orange, brown, and yellow wires follow a consistent pattern across all modules, allowing quick identification of connections. Each module uses the same layout, bill of materials, and assembly process, designed to make adding more broom modules straightforward.
CONCEPT & INSPIRATION
The project explores collaboration and synchronization between multiple autonomous beings faced with a common goal. Each broom's purpose is to maintain a clean environment. What makes 100 modular brooms compelling is the choreography that emerges when they cooperate: some brooms are hard-working, others lazy; some graceful, others clumsy; some energetic, others dull. These personality traits manifest in the quality of movement, creating a collective behavior greater than the sum of its parts. The work merges computational systems, kinetic sculpture, and cybernetic principles, drawing inspiration from:
Zimoun - Swiss artist Zimoun creates large-scale sound installations using mundane and industrial materials, like cardboard, boxes, cotton balls, and simple mechanical systems run by hundreds of DC motors. His work directly influenced this project's thinking about scalable, repeatable systems.
David Bowen - Bowen’s "tele-present wind" translates real-time wind data into mechanical movement using 126 motorized grass stalks. The work demonstrates how environmental sensing can drive coordinated physical responses which is a key aspiration for the brooms' future development with trash detection and responsive behavior.
Jason Bruges Studio + Mainframe, "Dyson Pinwheels"" commercial demonstrates how coordinated mechanical movements at scale can create compelling visual choreography, reinforcing the project's focus on synchronized motion as artistic expression.
THE SYSTEM
Dual-Motor Architecture
Each broom uses two 28BYJ-48 stepper motors: one for 60° sweeping motion, one for 360° rotation. This dual-axis control creates dynamic choreography across all 36 units. Shown here is early dual-motor prototype testing sweep and rotation coordination.
Multi-Motor Coordination
The firmware uses the AccelStepper library for non-blocking multi-motor coordination, allowing all 72 motors to move simultaneously without blocking delays. Each motor's speed, acceleration, and target position can be controlled independently.
The code manages complexity through careful organization. This snippet shows how the AccelStepper library coordinates multiple motors with non-blocking movement patterns, allowing simultaneous control while maintaining individual motor parameters. The Arduino IDE code was developed with assistance from Claude (AI).
CONTROL PANEL
Beyond the firmware, the system includes a custom web control panel accessible over WiFi. The interface provides real-time control of individual motors through a minimalist monochrome design. The panel organizes the 36 brooms into their modular units, with toggle controls for sweep and rotate motors on each broom.
The control panel was designed in Figma, then brought to life using Claude AI to generate clean HTML/CSS served directly from the Arduino. The strict monochrome aesthetic uses black borders, white backgrounds, and inverted states for active motors. Each broom card displays current motor status and allows independent control of both sweep and rotate functions.
The interface code demonstrates the minimalist design philosophy. With no external dependencies, the entire control panel is served from the Arduino itself, making the system self-contained and network-independent beyond WiFi connectivity.
FABRICATION & ASSEMBLY
Enclosures required precise fabrication: laser-cut plywood panels (3mm walls, 6mm base) with etched labels and layout lines for easy assembly. Aside from ease of assembly, the etching and laser cutting ensured repeatable placement across modules.
The brooms were hand-assembled from tampico fiber broom corn during team build sessions.
DEVELOPMENT JOURNEY
Iteration 1: Ceiling-Mounted Prototype
The first approach mounted brooms from the ceiling with motors above. Building a functional prototype quickly revealed what needed to change. Mounting the brooms from the ceiling meant a lot of electronic parts up top, creating a cluttered feeling. The brooms dancing on wooden floorboards felt more light and mysterious, evoking the magic broom scene from Fantasia.
Despite aesthetic issues, the ceiling prototype won "Most Innovative" at CMU's 2025 UX Hackathon, validating the choreography concept. Key insight: Build functional prototypes quickly. They reveal problems faster than planning.
DEVELOPMENT JOURNEY
Iteration 2: Modular Box System
The redesigned system features motors mounted inside a base enclosure, brooms attaching from below with threaded shafts, hinged side panels for access without disassembly, and a modular 3x3 grid making the system scalable.
Components were designed and fabricated using CAD modeling, laser cutting, and 3D printing. The team assembled and wired four complete modules through collaborative build sessions.
The initial fabrication and assembly process involved the full team. Collaborative build sessions allowed us to refine the assembly process, identify pain points, and improve the design iteratively. Careful documentation and modular design allowed for a single person to build a broom module.
WHAT'S NEXT
The platform is built. The architecture is proven. Now the choreographies begin.
The next phase integrates computer vision for environmental awareness. Overhead cameras will detect trash on the floor, triggering specific brooms to respond.
What’s more is that brooms will be programmed to respond differently to their sweeping task. Some will sweep in tight, precise arcs while others make broad, sweeping gestures. The idea is that their ‘personalities’ will emerge from tuning just a few parameters: sweep speed, rotation frequency, pause durations. Small differences in code can produce distinctly different characters in motion, especially across 100 brooms.
The modular platform makes this possible. Add modules. Add cameras. Add complexity. Maybe swap the brooms for fans, or light strips, or puppets. Stay tuned...
© Kimberly Blacutt 2025
The project received funding from the CS+X Grant, which "aims to catalyze innovation through collaborative projects involving advanced computation technologies, with a focus on novel and creative applications in disciplines outside of mainstream computer science." This recognition validates the project's approach to combining kinetic art with embedded systems, demonstrating how computational thinking can extend into physical, experiential design.